|

| 品牌 | HC |
| 型號 | 可定制 |
| 加工定制 | 是 |



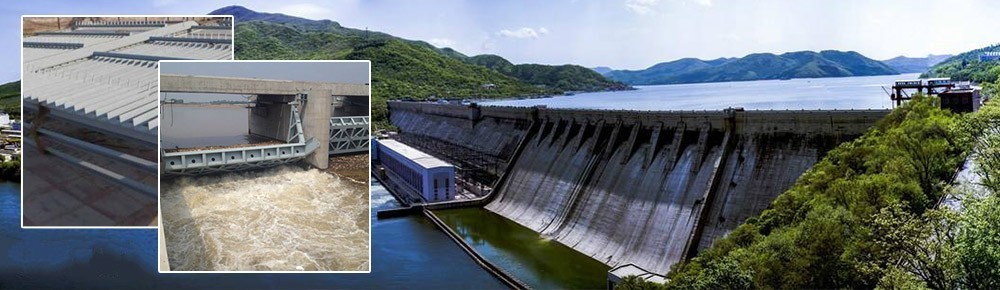
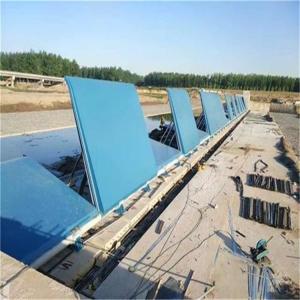
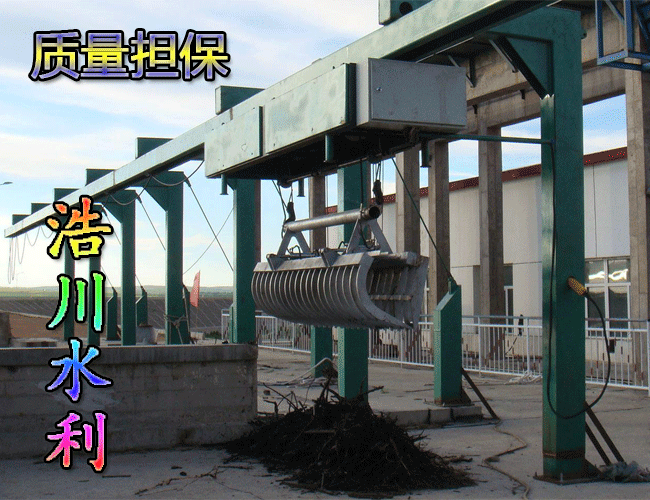
移動式攔污柵清污機的工作原理是通過設置于輪掛式載重平車上方的驅動裝置,帶動平車沿架空軌道作左(右)移動。經監控保護系統定位于某一預定位置后,抓斗升降驅動裝置(電動卷揚機)帶動兩組鋼絲繩卷筒,使清污抓斗在鋼絲繩牽引下向下運動;抓斗底齒部分伸入柵條縫隙之中,抓斗上齒則插入柵前污物體內,并依靠抓斗自重滑向格柵底部,對格柵從上至下進行清理;與此同時,采用液控式重力抓斗的清污機通過同步旋轉液壓滾筒實現液壓軟管與牽引鋼絲繩同步運動,而采用索控式重力抓斗的清污機則通過同步卷揚滾筒實現索控鋼絲繩與牽引鋼絲繩同步運動。當清污抓斗抵達格柵底部或抓斗裝滿時,電氣監控保護系統發出停止下行命令和關斗命令,抓斗停止下行,液控或索控開關斗機構關閉清污抓斗。隨后抓斗升降驅動裝置受令提升清污抓斗到達預設提升高度,電氣監控保護系統指令載重平車沿架空軌道向右(左)移動,將污物送入污物轉運倉。至此,單個清污周期完成并開始進入下一清污周期。同時,污物轉運機械可擇時將污物運送至污物堆放場。
索掛式清污抓斗及其驅動系統主要由索掛式清污抓斗和其驅動系統兩大部分組成。其中:索掛式清污抓斗根據其開關斗型式的不同有索控式重力抓斗和液控式重力抓斗兩種型式,是實現清污機抓污除污功能的最終部件;索掛式清污抓斗驅動系統主要由抓斗升降驅動裝置和抓斗開關斗控制裝置組成,兩大裝置共同支配抓斗的升降和開關,使抓斗實現清污功能。 電氣監控保護系統主要由清污機運行狀態及運行命令信息采集單元(主要是傳感器、按鈕等組成的輸入電路)、信息分析處理單元(主要是以工控機或PLC為核心的電控智能系統)、電氣驅動執行單元以及信息反饋監視單元組成。通過電氣監控保護系統可以對清污機工作全過程的實現監視、控制和保護。
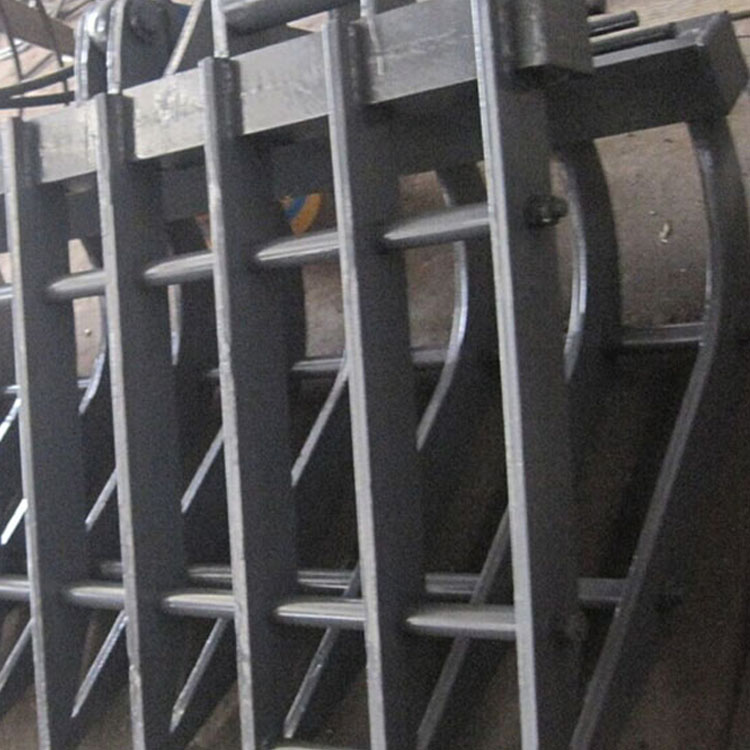
抓污的獨特設計可使抓斗在抓污時與格柵柵條緊密嚙合,因而可去 除格柵周圍毛發壯污物及纏繞物。
由于軌道橫跨在取水口處,使格柵平臺非常干凈。所有控制纜線也 延其布置,所以整體外觀非常清潔。
抓斗的提升與下降不需要任何軌道裝置,所以減少了因摩擦而引起 的能耗損失。